
新闻中心
关注蓝耘了解更多咨询
自动驾驶作为当前人工智能的热门领域,对安全性的要求极高。自动驾驶行业一方面不断推进高阶技术研发,另一方面隐含的高阶自动驾驶真正落地条件是安全性能要高于人工驾驶,在此基础上自动驾驶对于资源和人力成本的节省和便利才具有价值。
2022年8月,交通运输部发布《自动驾驶汽车运输安全服务指南(试行)》(征求意见稿),要求:在保障运输安全的前提下,鼓励在封闭式快速公交系统等场景使用自动驾驶汽车从事城市公共汽(电)车客运经营活动,在交通状况简单、条件相对可控的场景使用自动驾驶汽车从事出租汽车客运经营活动,在点对点干线公路运输、具有相对封闭道路等场景使用自动驾驶汽车从事道路普通货物运输经营活动。
对于自动驾驶车辆来说,安全是第一位,而其中最难的部分在于识别路况、判断路况,做出正确的决策。
路面跳出一只小动物,大小和高度都远远低于成人,自动驾驶车辆需要在存有大量数据的基础上判断正确,立刻刹车。
在诸多颜色中,自动驾驶车辆对于白色的识别难度最大,因为白色接近于天空的颜色,路上的白色车辆与背景颜色区分度在其他颜色中最小,然而车辆也应保证准确识别出白色的车辆或物体,在行驶过程中保障安全。
自动驾驶车辆主要通过毫米波雷达、激光雷达、超声波雷达、摄像头四种传感器融合收集路况信息,利用计算机技术,将来自多传感器的信息和数据进行自动分析,对传感器信息多层次、多空间信息互补、动态补充、优化组合,最终对车辆所处环境进行一致性解释和判断。
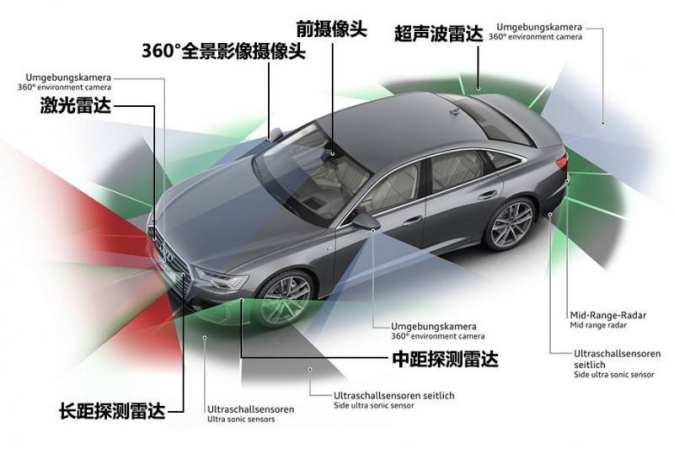
图片来源网络
任何一种探测器都有各自的优势和短板,自动驾驶无法靠单一传感器完成在复杂路况和不同天气、场景下保障车辆行驶安全的完整信息收集。
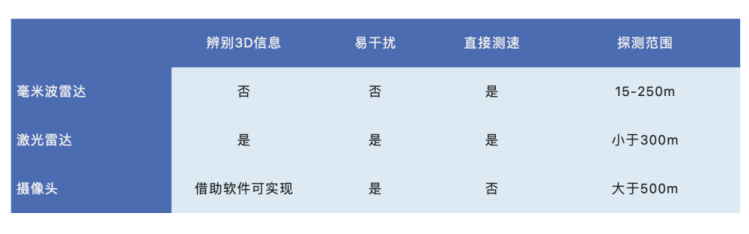
毫米波雷达利用电磁波的反射,测量物体的距离、速度等物理信息。它的抗干扰能力强,探测距离远,适合在雨雪风沙等恶劣的天气下使用。
然而毫米波雷达不具备测“高度”的能力,这使其很难判断前方静止物体是在地面还是在空中,在遇到井盖、减速带、立交桥、交通标识牌等地面、空中物体时,无法准确测得物体的高度数据,如果将这样的数据交给自动驾驶汽车,将使得自动驾驶汽车出现频繁刹车的情况。
图源:特斯拉
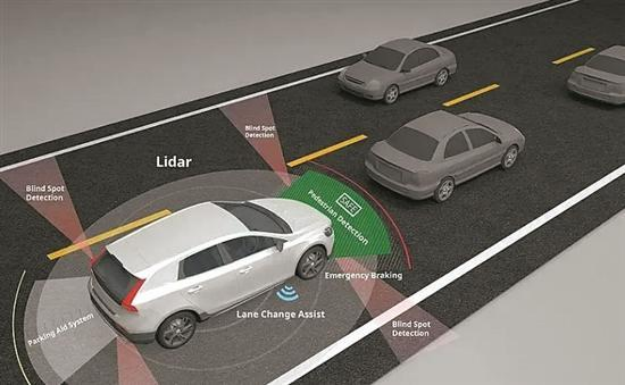
激光雷达使用激光为信号波,通过探测被物体弹回的信号波实现测量,具有分辨率高、低空探测性好的优势。激光雷达每秒发出数千个脉冲,通过计算不同角度的反射光波,激光雷达可以还原出目标物体的三维立体图像。缺陷是大雾、雨雪天气效果差。
图源:果壳
因此多传感器融合才可以满足自动驾驶对不同场景下路况信息的需求,随着L3自动驾驶车辆的上路和各个自动驾驶示范园区的落地,毫米波雷达中的升级版4D毫米波雷达受到广泛关注。
4D毫米波雷达,也称为成像雷达,在原有的功能基础上增加了高度信息,能够探测出物体的方位、距离、速度、高度四维数据。
同时,4D毫米波雷达具有像素级的角分辨率,可解析出目标物体的轮廓,让毫米波雷达实现近似于激光雷达的成像功能。4D毫米波雷达也可弥补传统毫米波雷达在高度数据上的缺陷,通过不同高度数据识别路况,提升了识别的准确度。
当前常见的L3阶段自动驾驶车辆引入了4K超高清摄像头等新型传感器,每天8小时数据采集系统数据量达到了30TB。激光雷达每秒约产生10-70MB左右的数据量,摄像头每秒约产生20-40MB左右的数据量,一辆车的多个传感器每小时共产生约40TB的数据量。
现在常见的智能单车一天生成的数据量在8GB左右。目前自动驾驶车辆的传感器随着智能化的深入还在不断增多,因此,对于自动驾驶来说,算力的支撑是刚需。
由于不同车辆对于多传感器融合的具体设置不同,按照数据处理方法的不同,多传感器融合系统的体系结构可以分为三种:集中式、分布式、混合式。
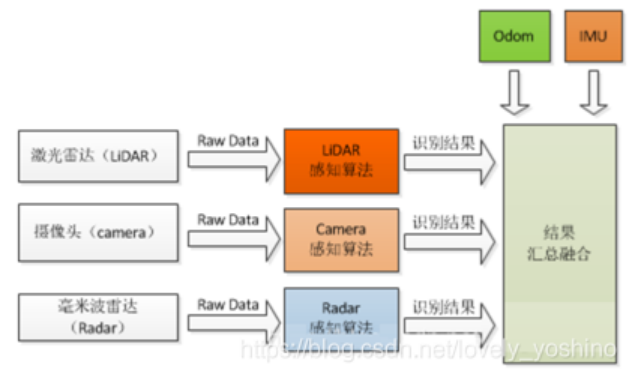
集中式——将各传感器获得的原始数据直接送到中央处理器进行融合处理,可以实现实时融合。
分布式融合——各个独立传感器使用自己的处理器处理数据,然后将结果送入到中央处理器中进行融合处理,优点是带宽要求低,计算快,系统可靠性和容错性高,局部失效不会影响全局,缺点就是各传感器模块体积大。
混合式——集中式和分布式的混合应用,即部分传感器采用集中式融合架构,其余传感器采用分布式融合架构。
根据传感器信息在整个融合流程中的位置划分,融合分为前融合和后融合,前融合包括数据集融合,特征集融合,后融合指的是目标集融合。不管是前融合还是后融合,自动驾驶的路况信息数据量极大,不同传感器之间的组合判断以及位置补差、信息处理均需要大量算力支持。因此,自动驾驶的感知层对算力应用的需求量是最大的。
在诸多人工智能领域,自动驾驶正是由于安全性能要求高、实际路况需要大量数据信息作为决策支撑,可以说是人工智能领域中对算力的刚需程度最高的领域。对数据的处理速度直接作用于自动驾驶系统的反应速度,车辆的算力支持与供给水平决定了高阶自动驾驶的大规模落地何时到来。
参考:中国电子报《L3级自动驾驶近了,4D毫米波雷达火了》






