
新闻中心
关注蓝耘了解更多咨询
12月23日,《面向自动驾驶的车路协同关键技术与展望》2.0版发布,白皮书由张亚勤院士牵头,清华大学智能产业研究院(AIR)与百度Apollo、中国信息通信研究院、中国信科、中国联通等10余家行业单位共同编制,是全球范围内对车路协同技术研究最深入的报告。
白皮书2.0进一步探讨中国车路协同自动驾驶(VICAD)发展路线的必然性,提出更加安全、泛化的自动驾驶技术方案和落地路径,将助推汽车产业由智能化向网联化发展实现“换道超车”。
高等级智能道路、车路协同自动驾驶以及便捷的智能化出行是未来交通的发展方向,其中车路协同自动驾驶将对算力有较高要求。本文摘编报告中车路协同的核心观点、部分关键技术以及算力需求情况,供读者参考。
亮点1:白皮书对“车路协同自动驾驶概念与内涵”的定义,同时涵盖了车路协同的各项基础技术
VICAD车路协同式自动驾驶的主要技术内容
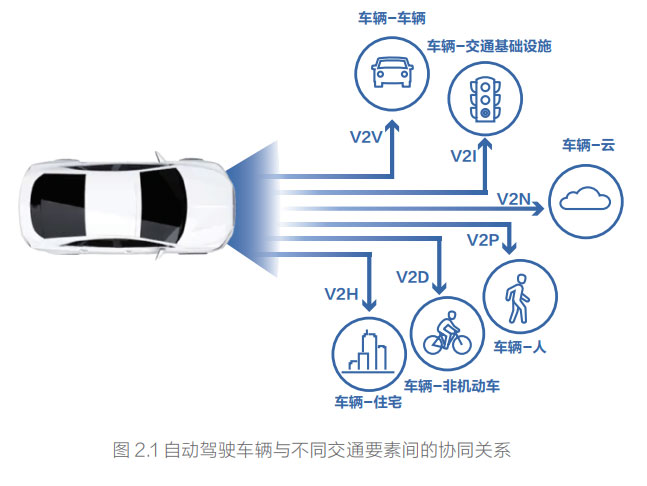
车路协同自动驾驶是在单车智能自动驾驶的基础上,借助C-V2X和4G/5G通信技术,将“人-车-路-云”交通要素有机地联系在一起,实现车与车(V2V)、车与道路(V2I,主要指道路各类系统和设备设施,如感知设施、气象检测器、状态监测设备、交通诱导与控制设施等)、车与云(V2N,地图平台、交管平台、出行服务平台等)和车与人(V2P)等的全方位协同配合(如协同感知、协同决策规划、协同控制等),从而满足不同等级自动驾驶车辆应用需求(如辅助驾驶、高等级自动驾驶),实现自动驾驶单车最优化和交通全局最优化发展目标。图2.1示意说明了自动驾驶车辆与不同交通要素间的协同关系。
VICAD车路协同式自动驾驶的主要技术内容
VICAD发展除自动驾驶技术外,还需要综合运用多种基础支撑技术,具体包括:
1)高可靠、低时延通信技术:包括无线通信和有线传输,其中无线通信又可分为直连无线通信(如LTE-V2X PC5、NR-V2X PC5等)和蜂窝移动通信(包括4G、5G,以及未来演进的6G)两类,有线传输则包括CAN、车载以太网、光纤网络等;
2)2D/3D高精度融合感知技术:包括传感器离线/在线高精度标定技术、多传感器融合技术、交通事件感知认知技术、交通参与者行为预测技术、交通运行状况检测与预测技术等;
3)高精度地图与高精度定位技术:包括高精度地图动态更新技术、路侧辅助定位技术等;
4)车路协同决策与协同控制技术:包括自动驾驶意图预测、博弈仲裁、引导调度等协同决策规划,车辆、设施、人等多目标协同控制技术;
5)高性能云计算技术:包括高性能边缘计算技术、多级云控平台技术、大数据和人工智能平台技术、算网一体智能调度技术;
6)多级纵深安全技术:如自动驾驶功能安全与预期功能安全,信息安全技术(包括数据安全、网络安全技术、地理信息安全等),安全统一认证技术、安全态势感知技术、安全主动防御技术等。
亮点三:车路协同一体化计算和互联是关键基础,一体化感知与决策控制是核心应用
自动驾驶将计算、感知、决策、控制一体化
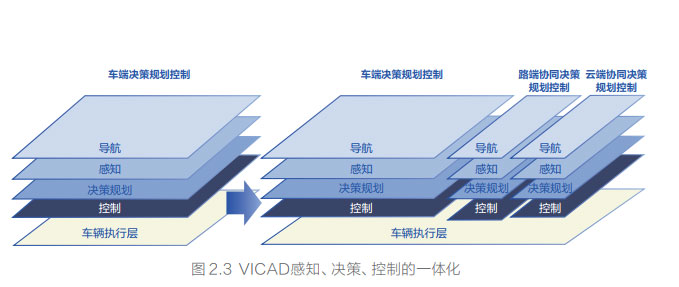
如图2.3所示,AD由车辆自身完成“感知-决策-规划-控制-执行”全过程,而在VICAD模式下,车辆、路端或云端都可能承担部分或全部“感知-决策-规划-控制-执行”功能,基于车路云一体化计算和互联,实现一体化感知、一体化决策规划和一体化控制,其中一体化计算和互联是关键基础,一体化感知与决策控制是核心应用。
在一体化计算方面,智能汽车的算力从2019年开始快速提升,目前TESLA Model3的算力达到144 TOPS,蔚来发布的ET7算力甚至会超过1000 TOPS,但仅仅依靠单车智能增加传感器提升感知能力、增加运算单元提升车端算力,这样会导致自动驾驶汽车成本无限增加。基于低时延、高可靠网络的传输互联,通过VICAD可以充分发挥路端和云端算力充裕、易部署调度等优势,对车端感知能力和算力进行有效分担,突破单车算力极限,实现全系统算力的合理分布分配和优化均衡。
在一体化感知、决策规划和控制方面,一体化感知可以通过车车协同感知、车路协同感知和车云协同感知的综合作用,起到扩展自动驾驶车辆感知范围、提高车辆感知能力的作用。一体化决策规划和一体化控制一方面可以帮助车辆克服全局优化类场景和极端场景,进一步提升自动驾驶的安全性、扩展自动驾驶ODD,提高车辆的自动驾驶能力;另一方面还能通过对交通环境的控制,为车辆创造安全秩序化的驾驶环境,提高交通整体运行安全性和效率。
车路协同自动驾驶发展的核心是建设高等级智能道路
VICAD需要车端、路端和云端齐头并进、协同发展,而建设高等级智能道路,全面提升道路基础设施的感知认知、连接通信、地图定位、决策控制等能力,将是VICAD发展的核心关注点和首要任务。中国完全有机会充分发挥自身的体制机制优势、战略政策优势和技术产业优势,形成VICAD可落地、可持续的技术产业路线,引领全球自动驾驶与智能网联汽车发展。
(1)不同等级智能驾驶汽车需要不同能力等级的道路支撑,以实现规模商业化虽然VICAD已成为我国发展高等级自动驾驶的明确技术路线,但不同等级的自动驾驶车辆要实现规模商业化发展,对道路的能力具有不同的要求,其中L2及以下等级车辆驾驶和责任主体是驾驶员,道路所需的能力以感知为主,而L3、L4高等级的车辆要想实现规模商业化,则需要较高能力的智能道路。
(2)我国公路里程数庞大,需要分级规划建设2021年末,我国公路总里程达到528.07万公里,其中高速公路里程16.91万公里30,位居世界第一。要将如此庞大的公路体系进行智能化升级改造,需要一个合理的建设规划与技术路径。公路智能化建设不是一蹴而就的,各地公路的自身条件不同,对智能化的需求也不相同,因此我国智能道路的发展应兼顾各地公路不同的功能需求,将公路划分为不同的智能化等级,并采取差异化策略分步骤建设。
白皮书在参考国内外自动驾驶分级、智能网联分级、智能道 路分级研究的基础上,结合我国VICAD发展与智能道路建设情况,提出了面向VICAD的道路智能化技术分级建议。
亮点五:白皮书给出了C4等级智能道路性能指标和算力需求分析。现阶段,满足高等级自动驾驶应用的高等级智能道路路端单个节点算力需求应不低于100 TOPS。
C4等级智能道路性能指标
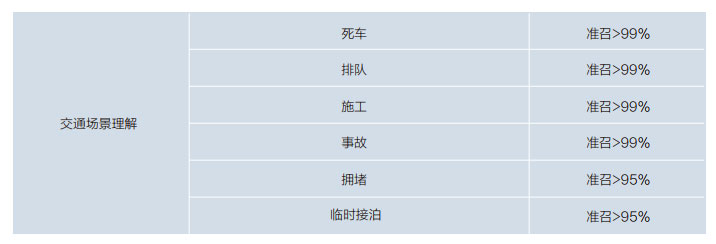
根据L4级自动驾驶对协同感知、协同决策控制的要求,提出C4等级智能道路的技术分级描述、典型特征、具体指标。

C4等级智能道路算力需求分析
要得到VICAD技术路线下智能道路的算力需求,就必须首先对标分析AD技术路线下车端算力的发展现状与趋势。如图5.1所示,目前自动驾驶车端算力已跨过千TOPS门槛,蔚来ET7、智己L7、Apollo RT6面向量产的自动驾驶车端算力最高达到了1200 TOPS,行业龙头NVIDIA甚至计划在2024年,推出超过2000 TOPS的Thor芯片,应用在自动驾驶DRIVE平台。

从服务于自动驾驶的角度来看,随着路端从协同感知向协同决策控制发展,路端算力与车端算力将呈现出相同的发展趋势,并且,路端单个节点的算力会明显超出单车算力,主要原因有:
1)VICAD中路端需要处理的具体任务与车端一致(都包括感知、地图、定位、决策规划、控制等),且都有高可靠、高精度、低时延要求。在车端和路端所需要解决的问题具备同源同构的特性,以感知环节为例,目标检测任务需要面对4大类20小类以上的参与者和障碍物;精确性方面,典型的位置精度需要达到带99分位约束的分米级精度;实时性方面,典型的端到端时延(物理世界发生到控制发出)需要达到带99分位约束的端到端百毫秒级;协同性方面,多传感器、多交通参与者、多基础设施间需要达到时空校准和能力协同;安全性方面,系统需显著优于人类司机,这就意味着系统安全和计算器件的冗余、保障机制等需要进行系统性设计,支撑自动驾驶达到99.9999%以上的场景通过率。
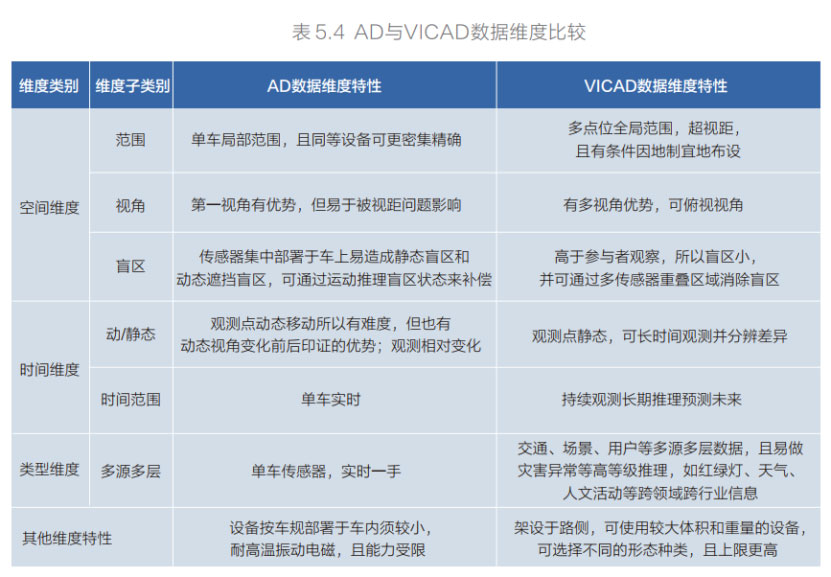
2)路端不仅要解决单车最优化的问题,还承载着群体最优和全局最优化的职责与使命,需要更高算力支持。VICAD区别于单车智能,是新的智能形态,通过引入新的智能要素,带来高维数据,并配合灵活算力和算法机制,实现由个体智能向协同智能或群体智能发展,提供更加多元化的应用服务,如智能信控、监控执法、收费等。以高维数据为例,VICAD会产生大量的数据,且信息特性与单车智能数据具有一定的正交属性,通过车路协同融合后将形成新的更高维度数据,如空间维度(范围、视角、盲区)、时间维度(动/静态、时间范围)、类型维度(多源多层)等,分布在不同维度具有正交性的高维数据信息量更大,对于智能系统的能力会产生更有效的帮助。VICAD与AD数据维度的比较见表5.4。
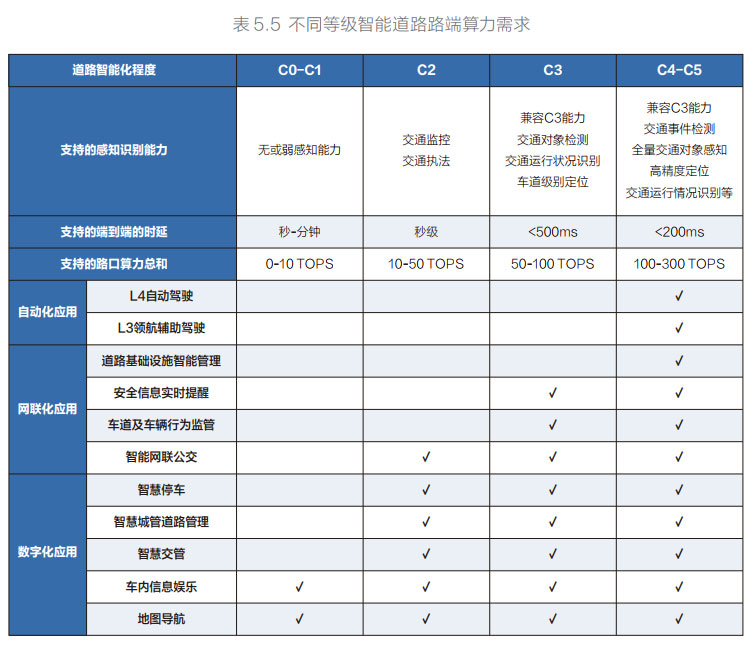
综合来看,目前的低等级道路,路端部署的设备功能较为单一、数据量小且算法模型简单;高等级智能道路为了达到表5.2和5.3所列性能指标,传感器数量、类型的增加及分辨率的提升,带来了海量数据处理需求,算法模型的复杂程度亦大幅提升,亟需算力提升,需要专门建设部署计算设备或设施执行数据汇聚、感知融合、任务调度、数据存储等关键任务。表5.5以国内多个城市的车路协同自动驾驶示范区中的路端算力为参考,列出了不同等级智能化道路路端的算力需求建议,现阶段,满足高等级自动驾驶应用的高等级智能道路路端单个节点算力需求应不低于100 TOPS。
C4等级智能道路对传感器性能要求
智能道路系统主要通过各类传感器设备完成对道路全要素信息收集,感知传感器应当满足全天时全天候要求,以应对各类自动驾驶场景。目前主流的感知传感器设备主要包括视觉传感器、激光雷达和毫米波雷达。每类传感器的感知范围、对不同物体的识别能力以及环境适应能力均有所差异,应发挥不同传感器性能优势,进行设备选型和方案配置,以达到最佳的感知效果。

亮点六:白皮书给出了智能道路系统总体架构和具体设计
高等级智能道路具体设计总体架构
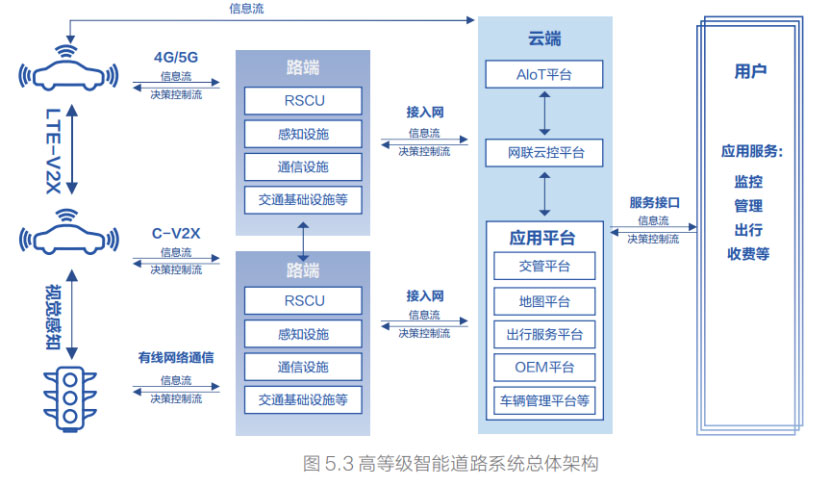
高等级智能道路系统总体架构见图5.3,从物理分布角度看,由车端、路端和云端三部分组成。
注:文章摘自清华大学智能产业研究院及阿波罗智联(北京)科技有限公司发布的《面向自动驾驶的车路协同关键技术与展望》2.0,详细内容请见白皮书原文。
摘自“清华大学智能产业研究院、百度Apollo,《面向自动驾驶的车路协同关键技术与展望2.0》,2022”。






